Module 4
Sensors
Time Duration : 45 minutes
🎓Objective:
To explain what sensors are and why are they used in our drones.
To explain different types of sensors used in our drone and explain how they function
📖 Content :
- What is a sensor is and what is it supposed to do?
A sensor is a device that detects and responds to some type of input from the physical environment.
The specific input could be light, heat, motion, moisture, pressure, or any one of a great number of other environmental phenomena.It converts physical data to electronic data. - The list of sensors that pluto uses which is
- Accelerometer
- gyro sensor
- Magnetometer
- barometer
All these sensors are developed using MEMS technology and this video may be used to give an introduction to MEMS
https://www.youtube.com/watch?v=Vld-5Z1YGVM
Each Sensor in detail :
- Accelerometer-
Accelerometers are used to determine position and orientation of the drone in flight. Accelerometer measures the proper acceleration
Accelerometer values help determine the roll and pitch movements of the drone
Accelerometer notices the change in the acceleration due to gravity whenever the drone performs a movement along X axis(forward and backward)or along the Y axis(sideward)
So basically the accelerometer is capable of knowing the roll and pitch of the drone
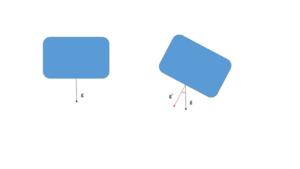
For a more detailed explanation about accelerometer use the following image
This is MEMS form of an accelerometer. Here the mass attached to the spring can move in a particular direction when it experiences acceleration
So the movement of the mass will cause change in capacitance between the fixed plates on the outside.
This change in capacitor is measured and converted to appropriate voltage values that are used in the circuit.
- Gyro sensor- Gyro sensors, also known as angular rate sensors or angular velocity sensors, are devices that sense angular velocity
Gyro sensors work according to the Coriolis effect that is a force that acts on objects that are in motion relative to a rotating reference frame.
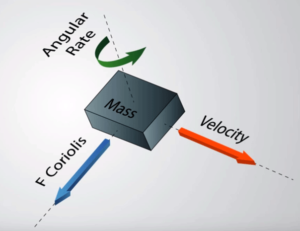
So if you have a body of a certain mass and it is moving with a velocity in a particular direction, if there’s an external angular velocity applied, there will be a force generated called coriolis force.
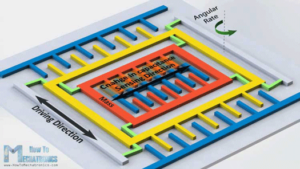
The next image depicts the MEMS form of a gyro sensor and this will help explain how the change in velocity and angular velocity of a body leads to change in the capacitance.
So we can obtain appropriate voltage values from these capacitance values.
- Magnetometer–
A magnetometer is an instrument that measures magnetism—either magnetization of magnetic material like a ferromagnet, or the strength and, in some cases, direction of the magnetic field at a point in space.
Basically magnetometer measure the earth’s magnetic field by using the hall effect or the magneto-resistive effect.
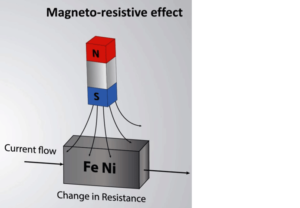
The onboard sensor works using the magneto-resistive effect,wherein materials like FeNi are used. Such materials when subjected to magnetic fields change their resistance and we use this resistance to obtain values.
So magnetometer is used as a digital compass that helps identify the magnetic north.
This helps in obtaining more precise readings.
4- Barometer- Barometer measures air pressure.
Now why do we need to measure the air pressure? The answer is simple, to help the quadcopter determine the height it is at. We all know as we move to higher altitudes, the air pressure decreases. So the barometer will know the air pressure and help in determining the relative height and help us in providing Althold i.e Altitude hold.
P = h⍴g
👐 Activities :
- Ask student to tell you all the possible types of sensors that they know and make a list of these in front of them at the start of this module.
You may also ask them which sensors do they think from the list would be used in the drone they’ll be building and why. - Ask them if man is a stable or unstable system.
The answer is that man is an unstable system,because the C.G is above the axis of rotation. - Use chrome app to explain every sensor to explain in details various physical parameters.
🙋 Frequently Asked Questions
- Where are sensors located on the Pluto PCB?
IC5 contains gyro, accelero and magneto
IC7 behind contains barometer
- Why the altitude in the graph starts from zero, when my drone is on the table?
Because barometer measures relative altitude, the starting point of flying is assumed as zero, then if it goes up it is positive and when it goes down it is negative.
What are real world uses of Accelerometer?
Accelerometer is used in daily devices like mobile phones, tablets to detect the rotation of devices, while you play games like temple run.

